| [ Bipoláris léptetőmotor vezérlő ] [ Eladó léptetőmotor ] [ Standalone stepper driver with LCD ] |
3 tengelyes bipoláris "boros" léptető motor meghajtó
Ábel István ©2008
ai1@freemail.hu
Az alábbiakban egy alapkiépítésben 3 tengelyes, igény szerint bővíthető optocsatolt elválasztással működő bipoláris chopper 0.75 A / tekercs meghajtásra alkalmas PC printer / nyomtató / LPT portjára köthető, PC felé home-position és ESTOP jeleket szintén optocsatolt elválasztással eljuttató, végállás kapcsolók és ESTOP bemeneteknél többféle szenzor fogadásához előkészített ( mikrokapcsoló, optokapu, Hall szenzor ), csak 2x AC 24 V tápfeszültséget igénylő, Mach és EMC2 megmunkáló programokkal is kompatibilis léptető motor megható leírása olvasható. A meghajtó néhány példányban általában rendelkezésre áll, amikor kifogy akkor néhány hetes átfutással rendelhető, ára 34.000.- Ft + 5 m nyomtató kábel 1000 Ft + postaköltséggel, két év garanciával.
Tartalom jegyzék
- Alap információk
- Nyomógomb kiosztás
- Jellemzők, pontosság
- Soros kommunikáció, LX-200 parancsok
- Bekapcsolás, készenlétí üzemmód
- Sebesség választás
- Nyomógomb funkciók
- A vezérlő indítása
- Beállítási és hibaelhárítási üzemmódok
Alap információk:
- az elektronikának 2 db alapesetben AC tápfeszültségre van szüksége, az egyik a motor táp ( ami a motor feszültséget szolgáltatja közvetlenül, és ebből egy belső feszültség szabályzó állítja elő a működéshez szükséges 5 V -os digitális tápot is ), valamint egy ettől potenciálfüggetlen ( nem közösített ) optocsatolókat kiszolgáló tápfeszültségre
- mindkét tápbemenet szimpla AC feszültséget igényel, ( DC feszültség is beköthető )
- motor táp: AC feszültség esetén 10 V AC .. 27 V AC ( effektív ) megengedett, ami áramkörön belül egyenirányításra és szűrésre kerül, amiből a motor tápfeszültség kb. az AC bemeneti feszültség x 1.41 -es szorzatán alakul ki, azaz a motor tápfeszültség áramkörön belül 14..39 V DC szűrt egyenfeszültség, DC feszültség használatához részletek alább. A motor tápot az áramköri lapon biztosíték védi ennek maximális értéke 4 A/N ( normál ), kisebb motor esetén csökkentendő.
- optocsatoló táp: AC feszültség esetén 6 V AC .. 27 V AC ( effektív ) megengedett, amiből az optocsatolók 5 V -os földfüggetlen tápfeszültségét fedélzeti stabilizátor alakítja ki, a biztosíték maximális értéke 1 A/F ( gyors ).
- amennyiben egyszerű választ szeretne trafó választásra: 1 db 230 V / 2 x 24 V / 100 VA hálózati trafó tökéletesen megfelel amennyiben a 2 db szekunder tekercs független egymástól ( 2 x 2 kivezetés, nincs közös pont ).
- a sorkapcsok csavarjainak meghúzásánál a sorkapocs házát meg kell támasztani kézzel, ne csak a beforrasztott csatlakozási pont ellensúlyozza a csavarhúzó nyomatékát, minél rövidebb a sorkapocs szerelvény ez annál fontosabb ( tehát a tápcsatlakozó bekötésénél a legfontosabb )
- a hálózati csatlakozó kialakításánál megfelelő kétáramkörös kapcsoló és egy olvadó biztosíték elhelyezéséről gondoskodni kell, a bekötésnél a 230 V -os szerelésre vonatkozó előírásokat be kell tartani.
- az elektronikát javasoltan fém dobozba illik szerelni zavarszűrés miatt, a fém doboz földelendő a hálózati csatlakozó földelésén át, de az elektronika belső vezetékeit és az áramkör alatt elhelyezkedő hűtőfelületet ne kösse a házhoz elektromosan.
- a printer port csatlakozó fém szerelvényeit ne kösse a házhoz elektromosan, illetve azt úgy szerelje be a házba, hogy a fém szerelvények a házhoz ne érjenek hozzá, ezen csatlakozó fém szerelvényei a nyomtató kábel árnyékolásán át a PC házához vannak csatlakoztatva, a nyomtató kábel földelését a PC biztosítja.
- a dobozba szerelés során az áramkör alatt a szabad légáramlást biztosítani kell
- az áramkör tartalmaz egy relét ez max. 10 A áram kapcsolására alkalmas alacsony DC feszültség esetében, 50 DC illetve 24 V AC -nél nagyobb feszültség relére vezetése, a tipikus felhasználó biztonsági ismereteinek hiányban nem javasolt.
- a motor bekötése: 4 pólusú sorkapcson, amennyiben ezeket 1-2-3-4 névvel illetem sorban egymás mellett, akkor a motor egyik tekercsének két végét az 1-2 csatlakozókhoz, a másik tekercsének 2 végét a 3-4 csatlakozókhoz kell kötni, a bekötés után sorkapocs pontjaira ellenállás mérővel javasolt méri: az 1-2 pontok között a motor tekercs ellenállás mérhető ami néhány Ohm, a 3-4 pontok között szintén, az 1-3, az 1-4, a 2-3 valamint a 2-4 pontok között mérve szakadás található, amennyiben nem ezt mérjük az áramkört ne helyezzük üzembe a hiba megkereséséig, a hibásan bekötött motor az elektronika és a motor tönkremenetelét okozhatja.
- a motor áram beállítása a 3 db mini potenciométerrel történik, az óramutató járásával ellentétes irányba tekerve a motor áram csökken, a minimum 0.21 A, az óramutató járásával egyező irányba tekerve a motor áram emelkedik, a maximum 0.75 A,
- a léptető impulzusok active-high típusúak ( a jel többnyire 0 V-os, léptető impulzus idején emelkedik 5 V -ra ) léptetés az impulzus felfutó élére, a minimálisan szükséges impulzus szélesség: 7 μs, amennyiben megoldható javasolt a 10 μs impulzus szélesség, ( az áramkör tipikusan 3 μs impulzussal elindul, de a tartalékok miatt javasolt a fenti minimum )
- az 1/1, 1/2, 1/5 lépés üzemmódok közti váltáshoz az áramkörön található egy darab jumper, habár fizikailag megoldható ezt a jelzett half_step_mode, illetve full_step_mode pozíción kívül máshova ne helyezze el, mivel az az áramkör meghibásodását okozhatja , a többi jumper tüske az áramkör felprogramozásában játszik szerepet.
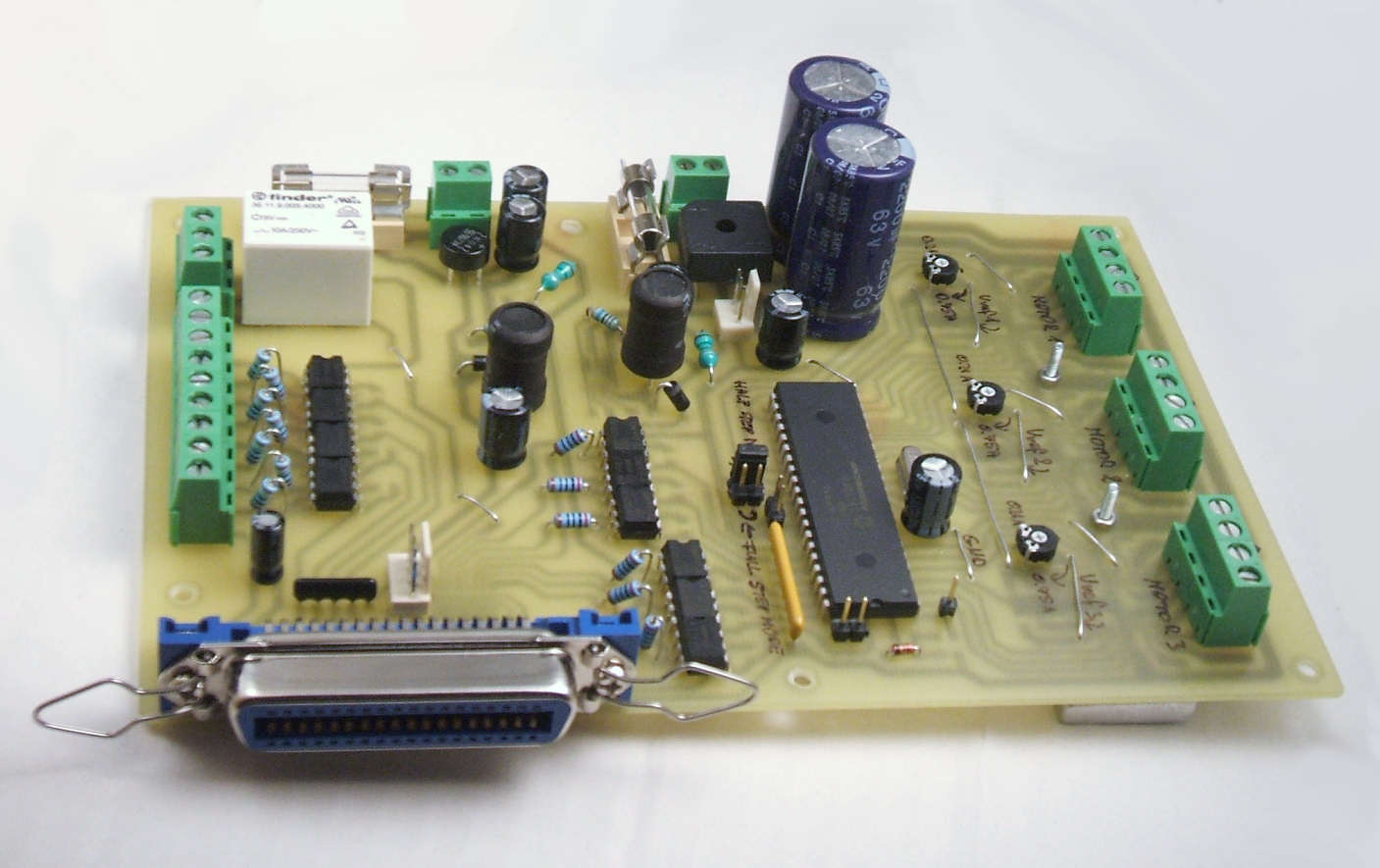
Az alábbi rajzon az áramkör fontosabb részei, a csatlakozók elhelyezkedése és a be/kimeneti pontok elnevezése található:
Amennyiben még nem fáradt el a továbbiakban részletesebb információkat találhat az áramkörről:
a párhuzamos porti csatlakozó jelei erősítettek: a minimálisan szükséges feszültség a portvonalon a vonal bekapcsolásához: 2.4 V ( azaz működik szabványos 5 V -os párhuzamos porttal is és nem annyira szabványos 3.3 V-ossal is ), a portvonalat az áramkör maximum 2 mA árammal terheli.
a léptetőmotor meghajtó bipoláris chopper, azaz motor áram stabilizált meghajtású, továbbá áram-visszaforgatásos, ez jó hatásfokú tápegység kihasználást biztosít. Tipp: amennyiben szeretné kipróbálni az elektronikát trafó vásárlása előtt, és előfordul a környéken egy Piko modell-vasút trafó amin külön "váltó" és "mozdony" kimenet van, akkor az elektronika kipróbálható 3 motorral a "váltó" kimenet motor tápként történő a "mozdony" kimenet optocsatoló tápként történő felhasználásával motor áram 0.3 A -nél kisebb beállításával.
a fedélzeti logikai 5 V -os tápfeszültséget, valamint az optocsatolók földfüggetlen tápfeszültségét jó hatásfokú fedélzeti kapcsoló üzemű tápegység biztosítja.
az elektronika 3 féle üzemmódba állítható be: teljes lépés, féllépés és 1/5-öd lépés ami utóbbi már a ministep kategóriába esik, a beállítás 2 db jumperrel történik, a két jumper ( 2x2 tüske ) a mikrokontroller közelében található, az egyik a full_step_mode a másik a half_step_mode nevet viseli, üzemmód jumperek beolvasása az áramkör feszültség alá helyezésekor történik, üzemmód menetközben nem váltható, az üzemmódváltást az áramkör a következő bekapcsolásnál veszi figyelembe.
- amenyiben egyik jumper sincs a helyén akkor - 1/5 lépés üzemmódban üzemel
- amennyiben a half_step_mode jumper a helyén van akkor mindenképpen fél lépés üzemmódban üzemel
- amennyiben a half_step_mode jumper nincs a helyén de a full_step_mode jumper igen, akkor teljes lépés üzemmódban üzemel.
Tipp: amennyiben nincs külön elvárása a motor felbontására vonatkozólag használja a fél lépéses üzemmódot ( half-step mode ) ebben a motor elméleti pozíció hibája valamint elméleti nyomaték hibája minimális ( a módosított nyomatékvektorú meghajtásnak köszönhetően ) és az elérhető sebesség is kedvező.
a bipoláris meghajtó IC-k túlmelegedés elleni védelemmel szereltek, a hővédelem megfelelő beszerelés esetén nem szól közbe, ha esetleg mégis akkor azt kérném számomra emailben jelezni, az áramkör alá szerelt hűtőborda amennyiben mindhárom motor maximális 0.75 A tekercsáramban folyamatosan üzemel jelentősen felmelegedhet, ekkor esetleg egy kisméretű ventillátorral hűthető. A hővédelem a meghajtó tranzisztorjainak 125 C körüli hőmérsékletén aktivizálódik, habár a ház hőmérséklete ennél alacsonyabb, de azért ez azt jelenti a hővédelem közbelépésekor a hűtőborda igen forró.
a meghajtó IC-k hűtőbordája az áramkör belső GND pontjához csatlakozik, ezért dobozba szerelés esetén a megfelelő szigetelő távolság tartásáról a doboz fém részeihez viszonyítva gondoskodni kell.
a mikrokontroller maximálisan 14kHz -es léptetési frekvenciát tud kiszolgálni a három tengely vonatkozásában ha mind a három tengely üzemel, ha csak egy üzemel akkor ennek közel a háromszorosát.
az áramkörben készenléti állapotban aktivizálódó tekercsáram csökkentés van, amennyiben közel 6 másodpercig nem érkezik egyik motorra sem léptető impulzus ez mindhárom motort készenléti állapotba helyezi, akkor a motor tekercsein a az adott pozícióban jellemző tekercsáram közel 1/3 -a folyik, amennyiben bármelyik motorra készenléti állapotban léptető impulzus érkezik, mindhárom motor tekercsárama visszaáll az eredeti értékre.
amennyiben esetleg az áramköri lapon elhelyezett relét megengedtem volna, hogy 230 V -ra lehessen kötni, akkor a maximálisan üzemeltethető 230 V-os motor teljesítmény 370 VA lett volna ( de ezt biztonsági okokból nem engedtem meg ).
Az áramköri lapon lehelyezett végállás kapcsoló bemenetek illetve a vészleállító bemenetet optocsatolt elválasztással juttatják a jelet a PC párhuzamos portjára, valamint alkalmasak: normál mikrokapcsoló, reed relé, optokapu, és hall-szenzor fogadására is.
- normál mikrokapcsoló és reed relé esetén a LIMIT_SWx bemenet és a LIMIT_SW_GND pontok közé kell azt bekötni.
- opto kapu, és hall szenzor alkalmazása esetén a LIMIT_SWx bement a szenzor open collector-os kimeneti pontjára köthető ( az áramkörön belül 390 Ohmos ellenállással és ezzel sorban az optocsatoló LED -jével csatlakozik a +5 V -os tápfeszültséghez ), amennyiben az optokapu egyszerű LED-et tartalmaz az a LIMIT_SWx_POWEROUT pont és a LIMIT_SW_GND pont közé kötve hozható működésbe ( LIMIT_SWx_POWEROUT kimenet 390 Ohmos ellenállással csatlakozik az 5 V -os tápfeszültséghez ), amennyiben a szenzor ezenkívül 5 V -os tápfeszültséget is igényel az LIMIT_SW_VCC ponthoz köthető.
Az alábbi ábra 4 különböző típusú szenzor bekötését mutatja, a legegyszerűbb a mikrokapcsoló nincs feltüntetve az az adott LIMIT_SW_1..3 vonal és a LIMIT_SW_GND vonal közé kötendő.
Amennyiben ezen érzékelők bekötése jelen néhány sor alapján nem egyértelmű kérje segítségemet emailben.
Az alábbi rajzon a ki/bemeneti pontokra jellemző áramköri részletek találhatóak egyszerűsítve:
A LIMIT_SW csatlakozó a motor vezérlő belső logikai 5 V-os tápfeszültség rendszerét használja, ami a külső optokapukhoz illetve hall szenzorokhoz is eljut. Ez azt jelenti, hogy egy esetleges meghibásodás, pl. motor feszültség bejutása a szenzorokba, nem okozza a vezérlő számítógép meghibásodását ( mivel az optocsatolóval elválasztott ), illetve nem teszi ki veszélynek a számítógép kezelőjét, viszont a motor meghajtó elektronika meghibásodását okozhatja. Ezért a külső szenzorok huzalozásánál az optocsatolt elválasztás ellenére azért a szigetelés vonatkozásában körültekintően kell eljárni. Jelentős hosszúságú szenzor vezetékeknél ahova a LIMIT_SW_POWER_VCC nevű 5 V -os tápfeszültség is kivezetésre kerül ( drága önálló szenzor modulok ) esetleg szükséges a LIMIT_SW_POWER_VCC, és LIMIT_SW_GND vezetékek kondenzátorral esetleg induktivitással történő további szűrése a motor meghajtóhoz közel ( nem biztos, hogy az áramkörbe épített szűrés extrém hosszú szenzor vezetékek esetében elegendő ).
DC tápfeszültség használata AC helyett:
amennyiben motor tápként DC feszültséget vezet az áramkörre, akkor ha a tápfeszültség szűrt ( kondenzátorral simitott ) a megengedett maximális DC bementi feszültség 39 V, amennyiben a tápfeszültség nem szűrt csak egyenirányított, akkor bekötés előtt ki kell próbálni, hogy egy kisebb elektrolit kondenzátorral szűrve a feszültség üresjáratban mennyi, és csak akkor köthető be ha az nem éri el a 39 V -ot
<
Az elektronika bővíthető 4 tengelyesre: ehhez két csatlakozó került elhelyezésre: az egyiken ki van vezetve az optocsatolók földfüggetlen tápfeszültség ( 5V ) és föld ( GND ) jele, valamint a párhuzamos port két további adatvezetéke. A másik csatlakozón a szűrt motor tápfeszültség és az abból előállított belső 5 V -os tápfeszültség a vonatkozó referencia GND ponttal együtt.
A 3 pontos csatlakozón kivezetett 5 V-os tápfeszültség csatlakozó használható egy kisméretű ventillátor csatlakoztatásra is ( bekötés rajz alapján, ha nem egyértelmű email nekem, figyelem: nem a hagyományos PC alaplapokon alkalmazott ventillátor csatlakozó bekötés ). A fedélzeti feszültség stabilizátor terhelhetősége kb. 1 A, szükség esetén javasolt az itthon beszerezhető 5V- os 0.6 W -os 40x40 mm -es ventilátor.
A léptetőmotor meghajtó beépített printer portos ( 36 pólusú Centronics ) csatlakozójának bekötése:
| FUNKCIÓ | PC printer port csatlakozó | léptető motor meghajtó, Centronics csatlakozó | Adatvonal | Bit neve | jellemző | típus |
| RELAY | Pin 1 | 1 | -Strobe | C0- | relay | open collector |
| STEP1 | Pin 2 | 2 | Data 0 | D0 | M1 | direct output |
| DIR1 | Pin 3 | 3 | Data 1 | D1 | direct output | |
| STEP2 | Pin 4 | 4 | Data 2 | D2 | M2 | direct output |
| DIR2 | Pin 5 | 5 | Data 3 | D3 | direct output | |
| STEP3 | Pin 6 | 6 | Data 4 | D4 | M3 | direct output |
| DIR3 | Pin 7 | 7 | Data 5 | D5 | direct output | |
| STEP4_EXT | Pin 8 | 8 | Data 6 | D6 | ext. | direct output |
| DIR4_EXT | Pin 9 | 9 | Data 7 | D7 | direct output | |
| GNDIO | 18,19,20,21, 22,23,24,25 | 19,20,21,22, 23,24,25,26,27, 28,29,30,33 | GNDIO | GNDIO | a PC GND rendszeréhez csatlakozik | |
| EMERGENCY STOP | Pin 11 | 11 | +Busy | S7- | ESTOP | input |
| LIMIT SWITCH1 | Pin 15 | 32 | -Error | S3+ | IN | input |
| LIMIT SWITCH2 | Pin 13 | 13 | +SelectIn | S4+ | input | |
| LIMIT SWITCH3 | Pin 12 | 12 | +PaperEnd | S5+ | input |
Beállítások a Mach2/Mach3 programokhoz:
- az előző táblázat STEP1,DIR1,STEP2,DIR2,STEP3,DIR3 vonalaihoz tartozó a "PC printerport csatlakozó" oszlopban levő "Pin ..." elnevezéseket kell a motor vezérlő jelek beállító tábláján kiválasztani, minden STEP jelnél az "active high" opció választandó, azaz az "Active Low" jelölő bokszban a piros "X" -nek kell szerepelni nem pedig a zöld pipának.
- a motor tuning beállító táblán van mód a léptető impulzus szélességének beállítására, a meghajtó igénye definiáltan 7 ?sec, javasoltan 10 ?sec ami tartalékot biztosít, s megjegyzendő, hogy a meghajtó elektronika tipikusan 3 ?sec -el már elindul. A pontosan beállítandó érték valószínűleg Mach program és számítógép függő. A Mach 2-nél tipikusan az elektronika 2 ?sec beállítással még nem üzemel, 3 ?sec beállítással viszont igen, itt 7 ?sec illetve annál több beállítása javasolt. A Mach3 esetében nyilvánvalóan nem valós az ott beállítandó érték, mivel 0 ?sec is beállítható aminél elvileg nincs kimenő jel, viszont a meghajtó elektronika ez esetben már 0 ?sec -es beállítással is üzemelni szokott. A lényeg hogy javasolt: a párhuzamos port kimenő vonalán 7 ?sec-es impulzus jelenjen meg minimum.
- az Emergency Stop sorban levő adatot állítsuk be a Mach program ESTOP bemenetére
- a Limit Switch 1..3 sorokban levőt pedig a megvalósított funkciónak megfelelően ( végállás kapcsolók, home pozition switch-ek ... ).
- a Relay -sor adatát állítsuk a kívánt funkcióhoz.
ALKALMAZHATÓ MOTORTÍPUSOK
4 kivezetéses bipoláris tekercs elrendezésű léptetőmotor, bekötése: 1A ==> M1A, 1B ==> M1B, 2A ==> M2A, 2B ==> M2B Beállítandó motor áram: a bipoláris meghajtásra specifikált motor áram
6 kivezetéses unipoláris tekercs elrendezésű léptetőmotor, bekötése: soros bipoláris üzem: 1A ==> M1A, 1B ==> M1B, 2A ==> M2A, 2B ==> M2B feles bipoláris üzem: 1A ==> M1A, 1X ==> M1B, 2A ==> M2A, 2X ==> M2B illetve: 1X ==> M1A, 1B ==> M1B, 2X ==> M2A, 2B ==> M2B A motor terhelhetőségi és nyomatéki adatait általában unipoláris üzemmódra adják meg ( ezt nevezzük most Iunipolar -nak ), ezt bipoláris üzemmódra a megváltozott hőleadás figyelembevételével át kell számítani, amennyiben nincs egyéb megfontolandó adat, akkor használjunk: soros bipoláris üzem-et, ekkor a meghajtón beállítandó bipoláris motor áram = Iunipolar x 0.707. Amennyiben feles bipoláris üzemet használunk akkor a beállítandó áram Iunipolar. ( Megjegyzés: a soros bipoláris üzemben a tekercsek hőleadása egyenletesebb, ha tehetjük használjuk azt ).
8 kivezetéses unipoláris tekercselrendezésű léptetőmotor, bekötése: soros üzem: 1A ==> M1A, 1B ==> M1B, 2A ==> M2A, 2B ==> M2B, 1X 1Y, 2X 2Y feles üzem: 1A ==> M1A, 1X ==> M1B, 2A ==> M2A, 2X ==> M2B, ( 1Y, 1B, 2Y, 2B nincs bekötve ) illetve: 1Y ==> M1A, 1B ==> M1B, 2Y ==> M2A, 2B ==> M2B, ( 1A, 1X, 2A, 2X nincs bekötve ) párhuzamos üzem: (1A 1Y) ==> M1A, (1X 1B) ==> M1B, (2A 2Y) ==> M2A, (2X 2B) ==> M2B A motor terhelhetőségi és nyomatéki adatait általában unipoláris üzemmódra adják meg ( ezt nevezzük most Iunipolar -nak ), ezt bipoláris üzemmódra a megváltozott hőleadás figyelembevételével át kell számítani, amennyiben nincs egyéb megfontolandó adat és a meghajtó áram tartománya ezt lehetővé teszi, akkor használjunk: párhuzamos bipoláris üzemet, ekkor a meghajtón beállítandó bipoláris motor áram = Iunipolar x 1.41. Amennyiben a meghajtó áram tartománya ezt nem engedi meg és nincs egyéb megfontolandó adat, akkor használjunk: soros bipoláris üzemet, ekkor a meghajtón beállítandó bipoláris motor áram = Iunipolar x 0.707. Amennyiben feles bipoláris üzemet használunk akkor a beállítandó áram Iunipolar. ( Megjegyzés: a párhuzamos és soros bipoláris üzemben a tekercsek hőleadása egyenletesebb, ha tehetjük használjuk azt, a párhuzamos üzemben a motor eredő induktivitása kisebb, az elérhető fordulatszám nagyobb, soros üzemben a motor árama kisebb ).
A tekercsek bekötésénél illetve azonosításánál figyelemmel kell lenni a tekercsek polaritására, mivel két ellentétesen felmágnesezett tekercs mágneses tere optimális esetben kiegyenlíti egymást nullára.
A bekötési mód megválasztásánál a következőt fontoljuk meg ( amennyiben az adott motorra többféle bekötés is lehetséges ), a tekercsek eredő ellenállásának és induktivitásának viszonya a különböző bekötési módok esetén: ( soros feles párhuzamos ) ezért a soros üzemmódban azonos nyomaték eléréséhez kisebb áramerősség szükséges mint a többi esetben, viszont a maximálisan elérhető léptetési sebesség kisebb az induktivitás miatt ( ez a relációban szereplő többi üzemmódra is vonatkoztatható ).
A motor áram mérése az áramköri lapon: az áramkörön megjelöltem a motor áram beállító potméterek környékén 3 db Vref elnevezésű pontot valamint egy GND nevű pontot. Az adott motorra vonatkozó Vref feszültség egy egyszerű digitális multiméterrel mérhető, pl. a Vref1 pont és a GND pont között az első motor referencia feszültsége. Ebből a Vref feszültségből a motor áram a következő módon számítható: Imotor [ A ]= Vref [ V ] x 3 / 20 azaz pl. ha a Vref feszültség mért értéke 5 V akkor a motor áram: Imotor = 0.75 A azaz maximális.
A vezérlőhöz használható a külön oldalon bemutatott 8 V-os robotron léptető motor is, amennyiben ilyen motort szeretne alkalmazni jelen vezérlőhöz, akkor vezérlővel együtt vásárolva a motorok 1000 Ft / db áron vásárolhatóak ( vezérlő + printer port kábel + 3 motor postaköltséggel 39.000.- Ft ).
További alkalmazható motorok mérsékelt áron hamarossan itt.
A kérdéseket és megjegyzéseket a fent jelzett emailben címen lehet feltenni, illetőleg esténként eseteleg dél körül a (29) 351-678 telefonszámon.
| [ Főoldal ] [ Térburkolatok ] [ Üllői vízmű ] [ Modellezés ] [ Úszómedencék ] [ Minolta AF5000 ] [ Habvágás ] |
| [ Bipoláris léptetőmotor vezérlő ] [ Eladó léptetőmotor ] [ Standalone stepper driver with LCD ] |
|
|
|